Informatsioon 4D transportimise konveierisüsteem





kettkonveier
| projekt | Põhiandmed | Märkus |
| mudel | SX-LTJ-1.0T -600H | |
| Mootori reduktor | Õmble | |
| struktuuri tüüp | Raam on valmistatud alumiiniumisulamist ning jalad ja painded süsinikterasest | |
| kontrollimeetod | Manuaalne/eraldiseisev/võrgus/automaatne juhtimine | |
| turvameetmed | Elektriline lukustus, kaitsejuhikud mõlemal küljel | |
| standardi omaksvõtmine | JB/T7013-93 | |
| kasulik koormus | Maksimaalselt 1000 kg | |
| lasti kontroll | Fotoelektrilised andurid | HAIGUS/P+F |
| ketirada | Madala hõõrdumisega nailonist rööbas | |
| konveieri kett | Donghua kett | |
| laager | Fukuyama riistvara, suletud kuullaagrid | |
| edastuskiirus | 12 m/min | |
| Pinnatöötlus ja katmine | Marineerimine, fosfaatimine, pihustamine | |
| mürakontroll | ≤73db | |
| pinnakate | arvuti hall | Lisatud proovid |
Seadmete struktuur
Konveier koosneb raamist, tugijalgadest, ajamist jne. Raam on valmistatud alumiiniumisulamist ja mõlemad otsad on fikseeritud hambutute tagurdusratastega. Konveieri kett on sirge kaherealine kett sammuga P = 15,875 mm. Keti tugi on valmistatud iseõlitava toimega kõrgmolekulaarsest polüetüleenist (UHMW). Keevitatud tugijalad on põhiraamiga ühendatud poltidega surveplaadi abil, M20 kruvidega reguleerimisjalad on ühendatud maapinnaga ja konveieri pinna kõrgust saab reguleerida +25 mm. Ajamiseade koosneb keskel asuvast sisseehitatud aeglustusmootorist, veovõlli komplektist, käigukasti ketirataste komplektist, mootoripesast ja keti pingutusseadmest ning kruvitüüpi reguleerimispinguti rihmaratas pingutab konveieri ketti.
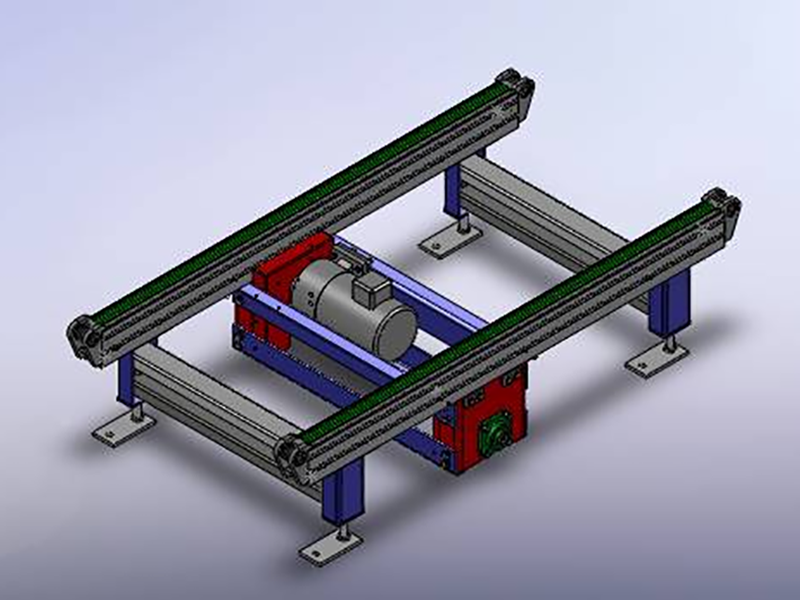
tööpõhimõte:
Mootor ajab veovõlli läbi ülekandegrupi ja veovõll ajab transpordiahelat, et realiseerida kaubaaluse transpordifunktsiooni.
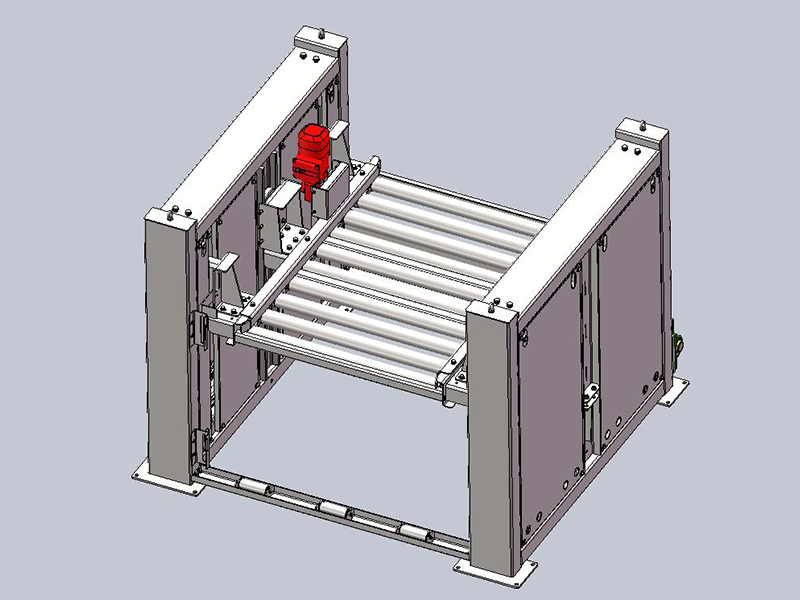
Rullkonveier
| Ese | Põhiandmed | Märkused |
| Mudel | SX-GTJ-1.0T -600H | teraskonstruktsioon |
| Mootori reduktor | Õmble | |
| struktuuri tüüp | süsinikterase painutamine | |
| kontrollimeetod | Manuaalne/eraldiseisev/võrgus/automaatne juhtimine | |
| kasulik koormus | Maksimaalselt 1000 kg | |
| edastuskiirus | 12 m/min | |
| rull | 76 topeltketiga rull | |
| veokett | Huadongi ketitehas | |
| laager | Ha-telg | |
| Pinnatöötlus ja katmine | Marineerimine, fosfaatimine, pihustamine | |
Seadmete struktuur
Seadme konstruktsioon: Rulllauamasin koosneb raamist, tugijalgadest, rullikutest, ajamist ja muudest üksustest. Rull φ76x3 ühepoolne topelthammasratas, tsingitud rull, rullide vahekaugus P = 174,5 mm, ühepoolne topelthammasratas. Keevitatud tugijalad on põhiraamiga ühendatud poltidega surveplaadi abil, M20 kruvidega reguleerimisjalad on ühendatud maapinnaga ja konveieri pinna kõrgust saab reguleerida +25 mm. Ajamiseade koosneb keskel asuvast sisseehitatud aeglustusmootorist, käigukasti hammasrataste komplektist, mootoripesast ja keti pingutusseadmest.
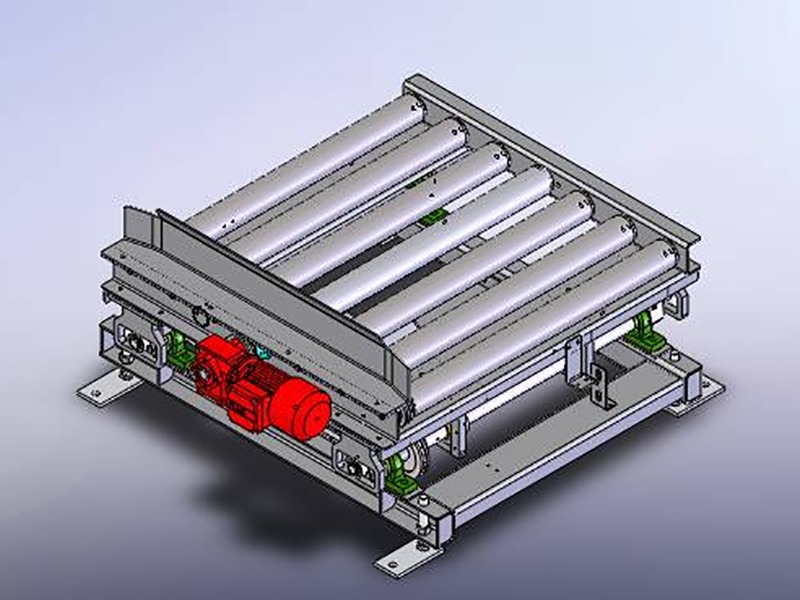
Tööpõhimõte: mootor ajab rulli läbi keti ja rull edastatakse teise keti kaudu külgnevale rullile ja seejärel teisele rullile, et realiseerida konveieri transpordifunktsioon.
Tõste- ja ülekandemasin
| projekt | Põhiandmed | Märkus |
| mudel | SX-YZJ-1.0T-600H | teraskonstruktsioon |
| Mootori reduktor | Õmble | |
| struktuuri tüüp | süsinikterase painutamine | |
| kontrollimeetod | Manuaalne/eraldiseisev/võrgus/automaatne juhtimine | |
| turvameetmed | Elektriline lukustus, kaitsejuhikud mõlemal küljel | |
| Standardne | JB/T7013-93 | |
| kasulik koormus | Maksimaalselt 1000 kg | |
| lasti kontroll | Fotoelektrilised andurid | HAIGUS/P+F |
| rull | 76 topeltketiga rull | |
| Laagrid ja korpused | Laager: Harbini võll; Laagripesa: Fushan FSB | |
| edastuskiirus | 12 m/min | |
| Pinnatöötlus ja katmine | Marineerimine, fosfaatimine, pihustamine | |
| mürakontroll | ≤73dB | |
| pinnakate | arvuti hall | Lisatud proovid |
Seadmete struktuur
Seadme konstruktsioon: Rullülekandemasin koosneb konveieri osadest, tõstemehhanismidest, juhtkomponentidest ja muudest üksustest. Konveieri pinna kõrguse reguleerimine +25 mm. Tõstemehhanism põhineb mootoriga käitatava väntvõlli põhimõttel ning ajamiseade koosneb keskel asuvast sisseehitatud reduktormootorist, käigukasti ketirattast, mootoripesast ja keti pingutusseadmest.
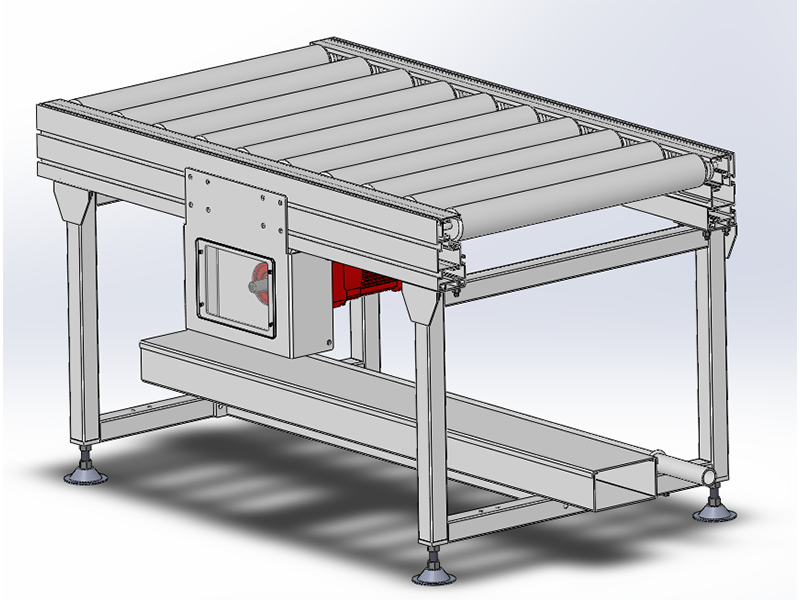
Tööpõhimõte: Kui kaubaalust transporditakse sobiva konveieri abil seadmesse, töötab tõstemootor, mis paneb kaubaaluse tõstmiseks nukkmehhanismi tööle, ja tõstemootor peatub, kui see on paigas; konveierimootor käivitub, vedades kaubaaluse dokkimisseadmesse ja mootor peatub, tõstemootor töötab ja nukkmehhanism hakkab seadet langetama ning kui see on paigas, peatub tõstemootor töötsükli lõpuleviimiseks.
Üleminekukonveier
| 1) projekt | Põhiandmed | Märkus |
| mudel | SX-GDLTJ-1.0T-500H-1.6L | |
| Mootori reduktor | Õmble | |
| struktuuri tüüp | Jalad ja painutatud süsinikteras | |
| kontrollimeetod | Manuaalne/eraldiseisev/võrgus/automaatne juhtimine | |
| turvameetmed | Elektriline lukustus, kaitsejuhikud mõlemal küljel | |
| Standardne | JB/T7013-93 | |
| kasulik koormus | Maksimaalselt 1000 kg | |
| lasti kontroll | Fotoelektrilised andurid | HAIGUS/P+F |
| ketirada | Madala hõõrdumisega nailonist rööbas | |
| konveieri kett | Donghua kett | |
| Laagrid ja korpused | Laager: Harbini võll, laagripesa: Fukuyama FSB | |
| edastuskiirus | 12 m/min | |
| Pinnatöötlus ja katmine | Marineerimine, fosfaatimine, pihustamine | |
| mürakontroll | ≤73dB | |
| pinnakate | arvuti hall | Lisatud proovid |
Seadmete struktuur
Seadme konstruktsioon: Seda seadet kasutatakse tõstuki ja riiuli ühenduskohas ning konveier koosneb raamist, tugijalgadest ja ajamist. Konveieri kett on sirge kaherealine kett sammuga P = 15,875 mm. Keti tugi on valmistatud iseõlitava toimega kõrgmolekulaarsest polüetüleenist (UHMW). Keevitatud jalad on ühendatud riiuli korpusega. Ajamiseade koosneb keskel asuvast sisseehitatud aeglustusmootorist, veovõlli komplektist, käigukasti ketirataste komplektist, mootoripesast ja keti pingutusseadmest ning kruvitüüpi reguleeritav pingutusrullik pingutab konveieri ketti.
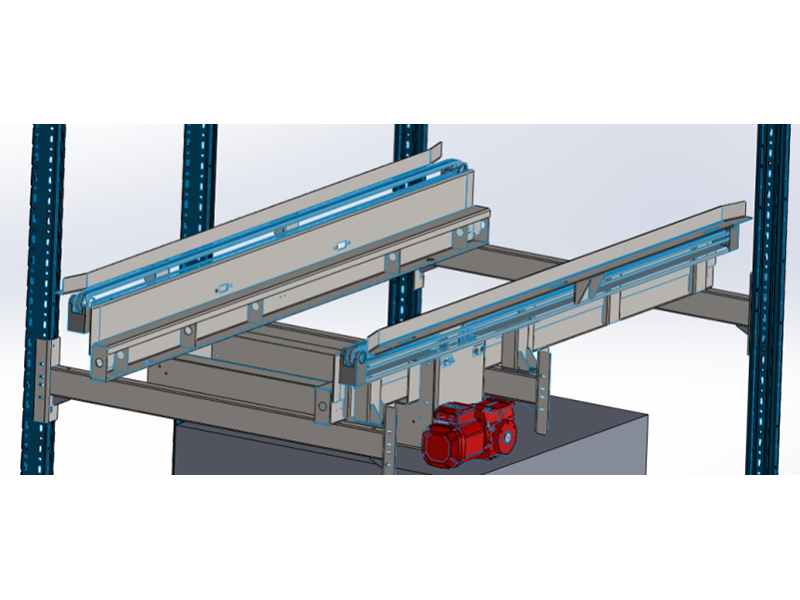
Tööpõhimõte: mootor ajab veovõlli läbi ülekandegrupi ja veovõll ajab transpordiketti, et realiseerida kaubaaluse transpordifunktsiooni.
põrandatõstuk
| projekt | Põhiandmed | Märkus |
| mudel | LDTSJ-1.0T-700H | teraskonstruktsioon |
| Mootori reduktor | Õmble | |
| struktuuri tüüp | Kolonn: süsinikterasest painutatud väliskülg: terasplaadist tihend | |
| kontrollimeetod | Manuaalne/eraldiseisev/võrgus/automaatne juhtimine | |
| turvameetmed | Elektriline lukustus, kukkumispeatusseade | |
| Standardne | JB/T7013-93 | |
| kasulik koormus | Maksimaalselt 1000 kg | |
| lasti kontroll | Fotoelektrilised andurid | HAIGUS/P+F |
| rull | 76 topeltketiga rull | |
| tõstekett | Donghua kett | |
| laager | Üldlaagrid: Harbini võlli võtmelaagrid: NSK | |
| jooksukiirus | Edastuskiirus: 16 m/min, tõstekiirus: 6 m/min | |
| Pinnatöötlus ja katmine | Marineerimine, fosfaatimine, pihustamine | |
| mürakontroll | ≤73dB | |
| pinnakate | arvuti hall | Lisatud proovid |
peamine struktuur ja omadused
Raam: kolonnina kasutatakse 5 mm süsinikterasest painutatud plaati ja väliskülg on suletud terasplaadiga;
Tõsteosa:
Tõstuki ülaosale on paigaldatud tõsteraam, mis on valmistatud süsinikterasest ja tõstemootor paneb tõstehammasratta komplekti keti kaudu tööle.
Laadimisplatvorm:
Valmistatud süsinikterasest. Laadimisplatvorm on varustatud standardse konveieriga.
tööpõhimõte:
Tõstemootor juhib laadimisplatvormi tõstetööde lõpuleviimiseks; laadimisplatvormil olev konveier võimaldab kauba sujuvalt lifti siseneda ja sealt väljuda.



